Introduction au moteur pas à pas
Le moteur pas à pas est un moteur qui tourne en fonction des impulsions qu’il reçoit dans ces bobinages. S’il reçoit une impulsion, cela correspond à une rotation de 1.8 degrés.
Si un bobinage “A” reçoit une impulsion avant le bobinage “B”, alors le moteur tournera dans un sens et si c’est l’inverse le moteur tournera dans l’autre sens.
Pour résumer :

Pour piloter un moteur pas à pas, nous avons plusieurs solutions pour lui envoyer les impulsions et dans quel sens celui-ci doit tourner.
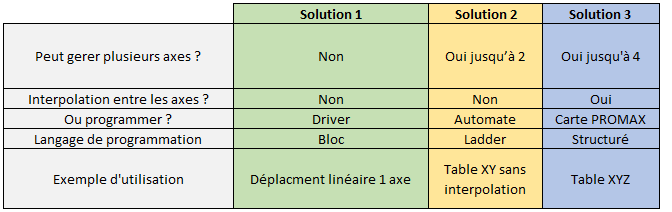
1. Première solution (IHM + Driver programmable)
La première solution est constituée d’une Interface Homme Machine IHM et d’un driver programmable (DPP_DS30XX ou DPP_DS50XX) et d’un moteur pas à pas.
L’IHM va nous permettre de :
- rentrer les différentes positions
- avoir un retour visuel de la solution
Le driver va nous permettre :
- d’envoyer le train d’onde (STEP) au moteur pas à pas
- de déterminer le sens de rotation
- de créer un programme pour autoriser ou non le déplacement

Pour pouvoir communiquer entre eux, l’IHM et le driver utilise un protocole de communication MODBUS.
2. Deuxième solution (Automate + Driver)
Pour créer les impulsions et dire au moteur dans quel sens tourner nous pouvons, pour cela, utiliser un automate I3 Lite, suivit d’un driver amplificateur (DPP_DS10xx) puis du moteur pas à pas.
L’automate envoie :
- un train d’impulsion (STEP)
- sens de rotation (DIR)
Nous avons choisi un automate I3C Lite car il comprend des sorties rapides nécessaires pour la création du train d’ondes.
Le driver amplificateur :
- envoi le signal STEP amplifié au bon courant vers le moteur
- définit le sens de rotation en fonction de DIR
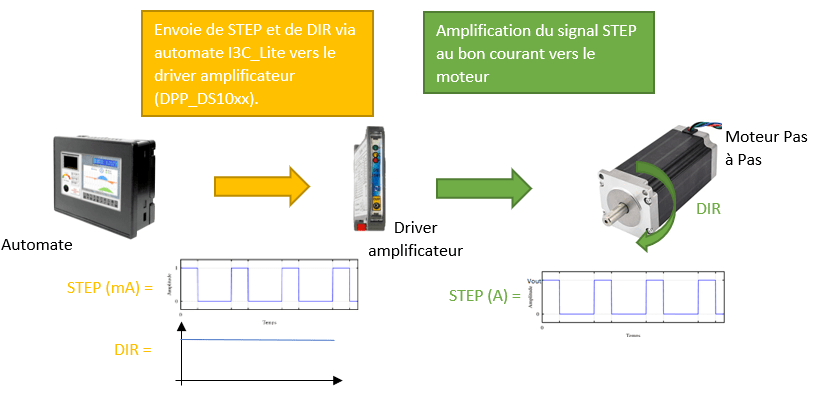
De plus, l’automate va nous servir à créer un programme, pour autoriser ou non le déplacement en fonction des conditions d’utilisation.
3. Troisième solution (IHM + Carte PROMAX + Driver)
La troisième solution serait de piloter les driver via un IHM, une carte PROMAX et des divers amplificateurs (DPP_DS10xx). La carte Promax permet de gérer jusqu’à quatre axes en même temps. De plus elle permet d’interpoler* les axes.
L’IHM va nous servir pour :
- entrer les positions
- avoir un retour visuel de la solution
La carte PROMAX quant à elle va nous servir pour :
- rentrer un programme pour autoriser ou non le déplacement
- envoyer les STEP aux moteurs en fonction du programme
Les drivers amplificateur vont permettre de :
- envoyer le STEP amplifié vers le moteur pas à pas
- définir le sens de rotation du moteur en fonction du DIR

Pour résumer :
*Interpoler : est une opération mathématique permettant de construire une courbe à partir des données d’un nombre infini de points, ou une fonction à partir de données d’un nombre infini de valeurs